|
Anti-delay MFA Controller
Many processes have large time delays due to the delay
in the transformation of heat, materials, and signals.
No matter what control action is taken, its effect may
not be measurable for a period of time. This is equivalent
to disabling the feedback, where feedback information
is essential to automatic control.
If a PID is used to control a process with significant
time delays, the controller output will keep growing
during the delay time and cause a large overshoot or
even make the system unstable. Typically, a PID has
to be de-tuned significantly in order to stay in automatic,
but this action sacrifices control performance. Generally
speaking, a PID works for the process if its Tau-T Ratio
(delay time/time constant) is smaller than 1. For a
process with a large Tau-T Ratio, PID must be de-tuned,
and when a controller is de-tuned, poor and sluggish
control performance occurs. Smith Predictor is a useful
control scheme to deal with processes with large time
delays. However, a precise process model is usually
required to construct a Smith Predictor. Otherwise,
its performance may not be satisfactory.
The following graph shows a block diagram for a SISO
Anti-delay MFA control system with an Anti-delay MFA
controller and a process with large time delays.
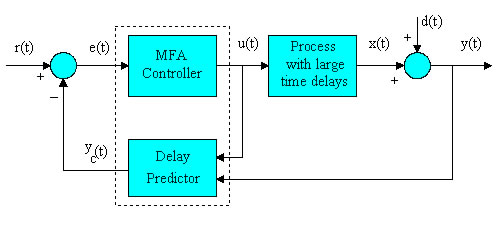
Anti-delay MFA control system
A special delay predictor is designed to produce a
dynamic signal yc(t) to replace the process variable
y(t) as the feedback signal. The idea here is to produce
an e(t) signal for the controller and let it "feel"
its control action without much delay so that it will
keep producing proper control signals. In other words,
this artificial dynamic signal yc(t) is able to keep
the feedback loop working even when there is a large
time delay. Since MFA adapts, the delay predictor can
be designed in a simple form.
Compared to a Smith Predictor, the Anti-delay MFA does
not need a precise process model. It only needs an estimated
delay time as the basic information for its delay predictor.
If the estimated delay time has a mismatch with the
actual process delay time, the controller is adaptive
and robust enough to deal with the difference. Typically,
satisfactory performance is achieved in a situation
where the delay time is 2 to 5 times larger or smaller
than the actual delay time. In addition, there is no
real limitation on the size of the process Tau-T Ratio.
The Anti-delay MFA is especially useful in controlling
process quality variables since a quality variable is
typically measured after it travels to a certain point,
cools off, or forms its shape. This controller makes
it possible for process industries to achieve Six Sigma
or zero defects quality control objectives.
In a semi-continuous production environment, the process
line speed may change as many as 100 times or more causing
the delay time to change on a similar scale. Since the
line speed is measurable, the delay time can be easily
calculated and provided to the Anti-delay MFA controller
in real-time. In this way, the control performance will
not degrade even during large line speed changes.
On the other hand, if the delay time of a process changes
on a scale of more than 5 times and the delay time information
cannot be provided to the controller, the Time-varying
MFA controller will be more suitable.
|